![]()
ViiK GateⅡ OVS-02GT(GR)について
ViiK GateⅡ OVS-02GT(GR) 検知原理・基本動作
- 本製品は、マイクロ波の反射を利用して車両を検知するセンサーです。
- 本マイクロ波センサーはFMCW方式を採用しているため在車検知ができます。
- 検知ロジックは次のようになります。
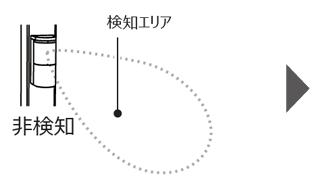
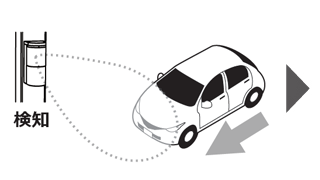
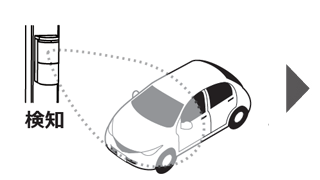

車両の進行角度による違い
センサーに対する車両の進行角度によって検知性能に差が出ます。「センサー設置条件」を確認の上、正しく設置してください。設置角度により、最適な設定がありますので、設定を誤ると性能が低下することがあります。
検知エリアに対して死角(センサー背面)から進入してくる車両を検知しにくいことがあります。
センサーの検知原理上、以下のような場合があります。
- 車両が検知エリアから離脱した場合でも、検知エリア内に人などの物体がある場合は非検知状態になりません。
旗やのぼり、伸びた草などでも非検知にならない(なりにくい)ことがあります。 - 複数の車両が連続して検知エリアに進入した場合、1台とみなすことがあります。
- 本製品は人キャンセル機能を有するため、車両検知中にセンサー前に人が立つと非検知状態になることがあります。
センサー前に人が立たない運用にしてください。
ViiK GateⅡ OVS-02GT(GR) 設置条件
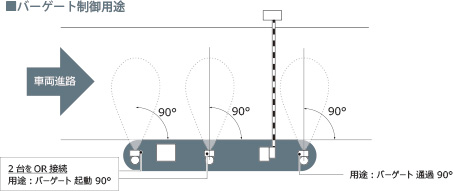
バーゲート制御用途
起動:バーゲートを開くため/ゲートシステム起動に使用するため
通過:バーゲートを車両が通過したことを認識するため
※図示しているセンサー角度は、車両が車路と平行に進入する場合の例です。センサー角度は、車両の進入角度に合わせて設置してください。
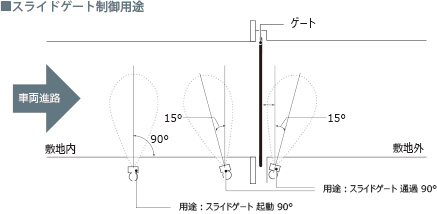
スライドゲート制御用途
起動:スライドゲートを開くため/ゲートシステム起動に使用するため
通過:スライドゲートを車両が通過したことを認識するため
※図示しているセンサー角度は、車両が車路と平行に進入する場合の例です。センサー角度は、車両の進入角度に合わせて設置してください。
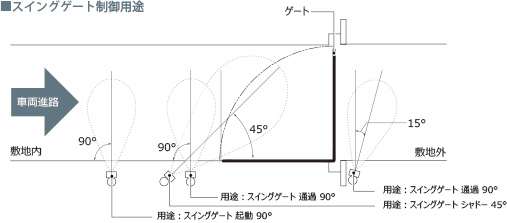
スイングゲート制御用途
起動:スイングゲートを開くため/ゲートシステム起動に使用するため
通過:スイングゲートを車両が通過したことを認識するため
シャドー:スイングゲートが閉じないように停止するため。
※図示しているセンサー角度は、車両が車路と平行に進入する場合の例です。センサー角度は、車両の進入角度に合わせて設置してください。
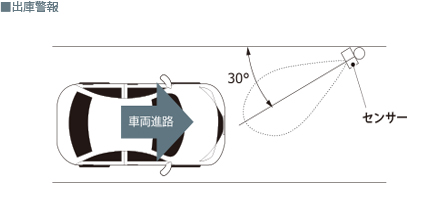
出庫警報用途
入庫方向では出力せず、出庫方向のみ出力して注意喚起に使用するため
※センサーの設置方向や設置高さが適正でない場合、正しく動作しません。(設置高さ:センサー下端から地面までが500mm、設置角度:車両の進路に向かって30°)
このような場合は設置にご注意ください
①ポールの傾き
センサーを傾いたポールに取り付けるとセンサーが地面を検知してしまい、正しく動作できません。必ず地面に対して垂直に立てられたポールに取り付けてください。
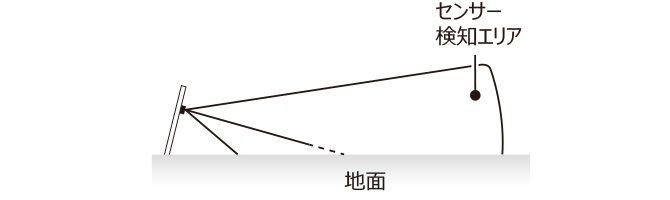
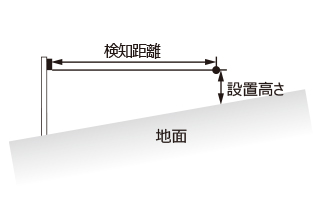
②地面の傾き
坂などで地面に対して垂直に立てられない場合は、設定した検知距離での高さが地面から500mmになる位置に設置してください。ただし、地面と垂直に設置したときと比べて検知性能が劣ることがあります。
③その他の周囲環境
- センサーの検知エリアの地面にはグレーチングなどの凹凸がないようにしてください。
センサーが非検知状態にならないことや、非検知状態になるまで時間がかかることがあります。
- センサーの検知エリア内に旗やのぼりなどの動くものを置かないでください。
また、検知エリア内に草木がある場合は撤去するか検知距離を短く設定してください。
センサーが非検知状態にならないことや、非検知状態になるまで時間がかかることがあります。 - 検知エリア周辺に蛍光灯機器を設置しないでください。正しく動作できないことがあります。
ViiK GateⅡ OVS-02GT(GR) 検知条件
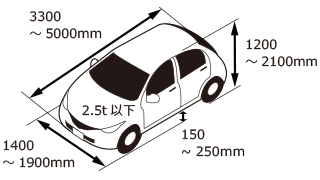
- ・センサーの検知対象となる車両は以下となります。
車両全長 3300mm以上 5000mm以下
車両全幅 1400mm以上 1900mm以下
車両全高 1200mm以上 2100mm以下
最低地上高 150mm以上 250mm以下
車両総重量 2.5t以下
- 時速2~35kmで進入する車両を検知します。
センサーの特性上、以下のような場合があります。
- 設置条件に適合しない場所に設置された場合、 正しく動作しないことがあります。
- 正しく設置・設定されていない場合、正しく動作しません。
- 複数の人や自転車、 大きな荷物 ( 特に金属 ) などが検知エリアに進入した場合、 検知することがあります。
- 車両が進入 ( 停止 ) する位置や方向によっては検知できる距離が短くなることや、 検知できないことがあります。
- 次のときセンサーが正常に動作しないことがあります。
・地面とセンサーを設置するポールが垂直でないとき
・センサー表面に氷や雪、ガムや泥などが付着したとき
・センサー部が凍結したとき
・どしゃぶりの雨が降っているとき
・水しぶきがかかったとき - 車両が進入(停止)する位置や方向によっては検知できる距離が短くなることや、検知できないことがあります。
困ったときには
- 動作表示灯が点灯しない。
-
つぎのような原因が考えられますので、それぞれの確認をお願いします。
①電源が供給されていない。
AC/DC12-24V の電源を配線してください。
②電源電圧が正しくない。
AC/DC12-24V の電源を配線してください。 - センサ検知がシステム機器に正しく伝わらない。
-
つぎのような原因が考えられますので、それぞれの確認をお願いします。
①リレー出力の配線が正しくない。
リレー出力の配線を正しく配線してください。
②出力接点形態が正しくない。
出力接点形態をシステム機器に合わせてください。 - キャリブレーション後に動作表示灯が早く赤黄に交互点滅する。(不安定状態キャリブレーションエラー)
-
つぎのような原因が考えられますので、それぞれの確認をお願いします。
①検知エリア内の人や物体を検知している。
センサー前方の人や物体(旗、のぼり、雑草など)を取り除いてください。取り除けない場合は検知距離を短くしてください。 - キャリブレーション後に動作表示灯が早く赤青に交互点滅する。(高反射キャリブレーションエラー)
-
つぎのような原因が考えられますので、それぞれの確認をお願いします。
①検知エリア内の人や物体を検知している。
リア内の地面にグレーチング等の凹凸がある。
②設置高さが低く、地面を検知している。
本体下面が地面から 500mmの高さになるように設置してください。
③センサを設置したポールもしくは地面が傾いているために、地面を検知している。
ポールが地面に対して傾いている場合、正常に動作できないことがあります。地面に垂直に立っているポールに取り付けてください。
④センサー(検知エリア)の向きが正しくない。
近くの車両や壁 ( フェンス )、ゲートバー等の影響がないようセンサーの向きを調整してください。
⑤検知エリア内にスライドゲートやスイングゲート等がある。
ゲートから15度外向きにセンサーを向けてください。 - 検知エリア内に車両が進入したとき検知しない時がある、もしくはまったく検知しない。
-
つぎのような原因が考えられますので、それぞれの確認をお願いします。
①電源が供給されていない。
AC/DC12-24V の電源を配線してください。
②電源電圧が正しくない。
AC/DC12-24V の電源を配線してください。
③キャリブレーションが正しく行われていない。
キャリブレーションを正しく実行してください。
④センサー(検知エリア)の向きが正しくない。
適切な方向にセンサー ( 検知エリア ) の向きを調整してください。
⑤背景の影響を受けている。
キャリブレーションを再実行してください。
⑥検知距離が短い。
検知距離を長くしてください。
⑦感度が低い。
検知感度を上げてください。
⑧検知判定時間が長い。
検知判定時間を短くしてください。 - 検知エリア内から車両が離脱したとき非検知にならない、もしくは非検知になるまで時間がかかる。
-
つぎのような原因が考えられますので、それぞれの確認をお願いします。
①非検知感度が高い。
非検知感度を下げてください。
②検知エリア内に人もしくは自転車や大きな荷物、伸びた草などがある。
これらのものを検知エリアから取り除いてください。取り除けない場合は検知距離を短くしてください。
③センサーの表面にガム等の付着物がある。
付着物を取り除いてください。
④キャリブレーションが正しく行われていない。
キャリブレーションを正しく実行してください。
⑤センサー ( 検知エリア ) の向きが正しくない。
適切な方向にセンサー ( 検知エリア ) の向きを調整してください。
⑥センサーの設置場所と設定が正しくない。
設置場所に合わせた"用途"を選択し、パラメータを調整してください。
⑦オフディレー時間が長い。
オフディレー時間を短くしてください。 - 車両を検知していたが、途中で非検知になる。
-
つぎのような原因が考えられますので、それぞれの確認をお願いします。
①非検知感度が低い。
非検知感度を上げてください。
②検知距離が短い。
検知距離を長くしてください。
③センサー ( 検知エリア ) の向きが正しくない。
適切な方向にセンサー ( 検知エリア ) の向きを調整してください。
④センサ(検知エリア)の向きが正しくない。
センサ(検知エリア)の向きがゲートバーと並行になるよう調整してください。
⑤センサーの設置場所と設定が正しくない。
設置場所に合わせた"用途"を選択し、パラメータを調整してください。
⑥オフディレー時間が短い。
オフディレー時間を長くしてください。 - 検知したいエリア外を通る車を検知してしまう。
-
つぎのような原因が考えられますので、それぞれの確認をお願いします。
①感度が高い。
感度を下げてください。
②検知距離が長い。
検知距離を短くしてください。
③センサ(検知エリア)の向きが正しくない。
適切な位置になるようセンサ(検知エリア)の向きを調整してください。 - 大きな荷物や金属物をもって検知エリア内に入った人を検知してしまう。
-
つぎのような原因が考えられますので、それぞれの確認をお願いします。
①感度が高い。
感度を下げてください。
②検知判定時間が短い。
検知判定時間を長くしてください。
③金属物や物が大きすぎる。
大きな物は車両と区別できない場合があります。人が入らない対策をとってください。 - センサーの検知が遅い。もう少し遠くから検知させたい。
-
つぎのような原因が考えられますので、それぞれの確認をお願いします。
①検知感度が低い。
検知感度を上げてください。
②検知判定時間が長い。
検知判定時間を短くしてください。
③検知距離が短い。
検知距離を長くしてください。
④”用途”選択が正しくない。
スマートフォンアプリにて正しい”用途”に変更してください。 - 発車直後に戻ってきた車を検知しない。
-
つぎのような原因が考えられますので、それぞれの確認をお願いします。
①感度が低い。
感度を上げてください。
②非検知後感度アップが無効になっている。
非検知後感度アップ機能を有効にしてください。
③非検知後感度アップ時間が短い。
非検知後感度アップ時間を長くしてください。 - 検知エリア外の車路を走行する車両を検知してしまう。
-
つぎのような原因が考えられますので、それぞれの確認をお願いします。
①検知感度が高い。
検知感度を下げてください。
②検知距離が長い。
検知エリアの先端では対向車を検知することがあります。検知エリアが対向車線にかからないよう検知エリア距離を調整してください。
③非検知後感度アップ時間が短い。
非検知後感度アップ時間を長くしてください。 - ゲートバーを検知してしまう。 ゲートバーが開閉を繰り返す。
-
つぎのような原因が考えられますので、それぞれの確認をお願いします。
①検知感度が高い。
検知感度を下げてください。
②検知距離が長い。
検知距離を短くしてください。
③センサーの取り付け位置がゲートバーに近すぎる。
センサーはゲートバーから 700mm 離して設置してください。
④センサー ( 検知エリア ) の向きが正しくない。
センサー ( 検知エリア ) の向きがゲートバーと並行になるよう調整してください。
⑤ゲートバーに暖簾がついている。
暖簾を外してください。
電話でのお問い合わせ
- フリーコール
- 0800-888-8700
- FAX
- 03-5473-3990