![]()
保有技術

保有するいくつもの技術の中から現場に最適なものを選択し、これらを自在に組み合わせることで用途やニーズに合ったセンシング性能を実現しています。さらに、製品の小型化に必要な光学設計や通信技術など、多様なハード設計の技術ノウハウを蓄積、反映させています。
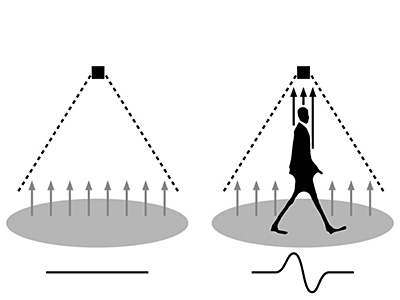
遠赤外線 (PIR)
原理:全ての物体や人からは遠赤外線(熱)が放射されており、センサーに近づく物体による熱の変化量をみることで物体や人を検知します。
ダブルコンダクティブフィルタ
太陽光や車のヘッドライトなどの光から出る赤外線を遮断することにより、対象物の熱変化だけを確実にとらえます。
クアッドゾーンロジック
小動物と人を見極めて、ペットなどによる誤動作を回避するために独自に開発された光学系技術。検知エリアと処理回路の工夫により実現しています。
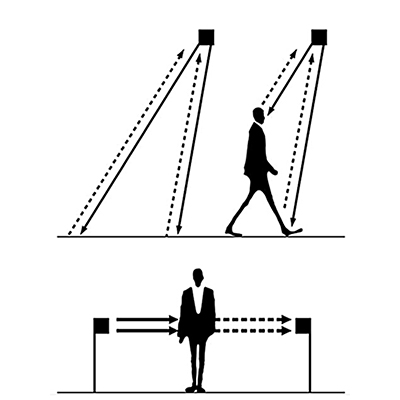
近赤外線(AIR)
原理:近赤外線を人や物に照射し、反射や遮蔽によって起こった変化量をみることで物体を検知します。 近赤外線は、検知範囲が明確で、応答速度が速いのが特長です。
ノイズリダクション
降雨、降雪、気温などの自然環境変化、ペットなどの小動物の侵入など、多様な誤動作要因への対策には、独自のソフトウェア処理によって対応。高度なソフトウェア処理により、技術的には相反する高感度と誤動作低減を両立します。
また、移動体だけでなく静止体を検知し続けることも可能にしています。
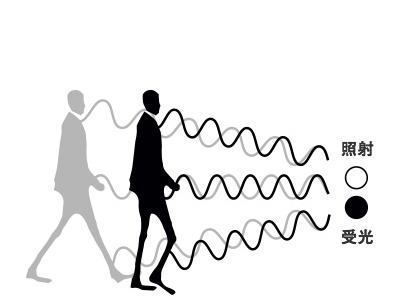
マイクロウェーブ
原理:アンテナからマイクロ波を発信し、反射波の周波数の変化をみることで移動体を検知します。ドップラー効果の原理を利用しています。また、物体までの距離を測定できるセンサーもあります。
AIRとのコンビネーション
検知範囲を広く設定することができるマイクロウェーブ技術と、静止体を正確なエリアで検知することができるAIR技術の融合により、安全かつ素早い検知を実現しています。また、マイクロウェーブ技術の特性を活かし、移動方向の判別を行えるものもあります。
PIRとのコンビネーション エリアシェーピング技術
人の動きを敏感に検知するPIR技術と温度変化の激しい環境下でも影響を受けないマイクロウエーブ技術の融合により、小動物の動きやカーテンの揺れなどによる誤動作の削減と失報の少ない確実な検知を可能にしています。
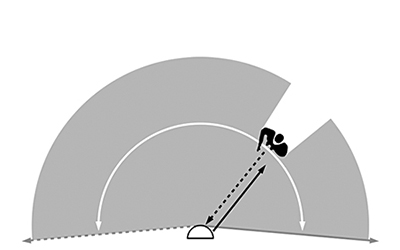
レーザースキャニング
原理:レーザーセンサーは、投光素子から照射されたレーザー光が物体に反射して返ってくるまでの到達時間を計測(光波測距(Time of Flight))・換算することで、センサーから物体までの距離を正確に測定できます。投光素子を回転させながらレーザーを照射させることにより平面的な検知エリアを構成します。
物体の大きさ、移動距離、移動速度の3つのパラメーターから独自のアルゴリズムで人と車のみを検知します。小動物、草木の揺れ、雨・霧・雪などの使用環境条件による誤動作要因を確実に排除しています。
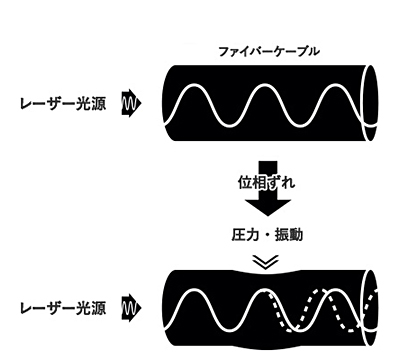
光ファイバーセンサー
原理:光ファイバーケーブル内にレーザー光を投光、ケーブルの振動や圧力変化、屈折などによっておこるケーブル内を通るレーザーの位相ずれを、受光部で検知します。この技術の特長として電気的、電磁的な干渉を受けることなく、長距離監視ができます。
非検知ファイバーケーブルを使って警備区域から最大20km離れた場所に電源部の設置ができます。 また、高周波をファイバーで検知する技術の確立により、多様な用途への応用が可能になります。
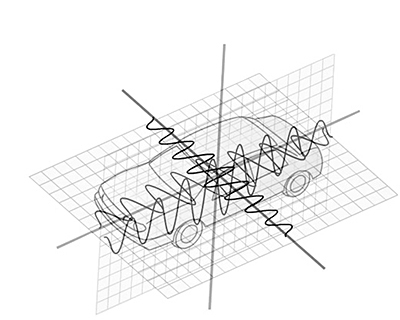
加速度
原理:センサー自体の速度の変化を検出するもので、測定数値を信号処理することで、傾きや動き、振動や衝撃といったさまざまな情報が得られます。
ノイズキャンセリングテクノロジー
路面の大きな凹凸や踏切の継ぎ目などの衝撃など、運転挙動(急ブレーキや急ハンドル)に関連しない不要な記録を除き、必要なシーンのみを判別・記録することができます。
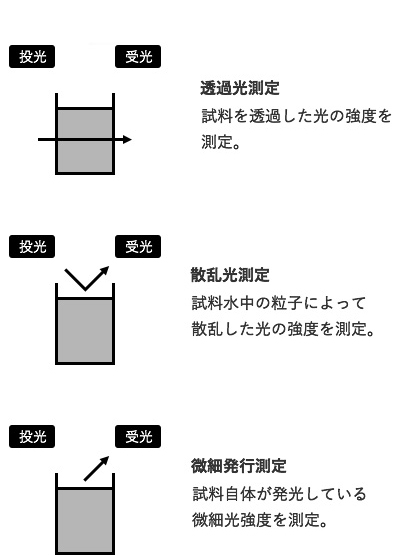
水質測定
原理:測定物の特徴・特性に応じて、さまざまな波長の測定光源と独自ノウハウを有する光計測方式を組み合わせて、物質の濁りや色などの水質を測定します。
LED光源劣化の影響を極小化
長寿命のLED光源を更に基準光を受光することで、微少な劣化の影響をも受けにくくした、参照光技術を採用。
外乱光の影響を受けにくいパルス信号制御
光源をパルス発信(ON)し、無発信時(OFF)に外乱レベルを把握。ON/OFFの差分のみを処理することで、外乱光の影響を除去しています。屋内外問わず、安定した測定が可能です。
苛酷な環境での安定計測を実現
水質の連続モニタリングを確実に実現するため、汚れに強い独自のワイパー制御と測定レンズは傷に強いサファイアガラスを採用。レンズ面の汚れを定期的に除去し、測定環境に存在する鉱物や砂利などによるレンズ面への傷の問題を解消。メンテナンスも簡単です。
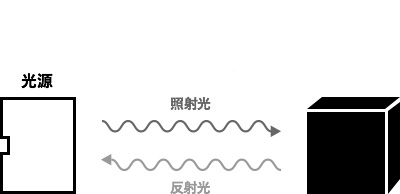
画像認識(人追跡)
原理:撮像素子で取り込んだ画像データを分析し、独自のアルゴリズムにより、検知対象物を判別します。
画像認識技術 ベクトル焦点法
人の立体的な外形形状からベクトル情報を計算し、それらを集積することで、人を検出しています。
複雑な人の動きや、影の有無を自動で判断し、影と人の違いを正確に認識、計数できます。

3次元距離画像
原理:近赤外線LEDの光束光源を投光し、投光した光が対象物に当たってCMOSイメージセンサーに取り込まれる時間(光波測距(Time of Flight))を約2万点の画素ごとに距離データに変換。対象物までの距離や立体的な形を捉えます。
光学技術
様々なアプリケーションに適応できるエリア設計技術により、用途の拡がりや小型化を実現します。
ノイズリダクション
太陽光(約10万lux)に代表される耐環境性能を飛躍的に向上させ、照明環境、設置条件に左右されず屋外でも的確な画像を取得できます。
エネルギーハーベスティング技術
原理:光・熱(温度差)・振動・電波など環境中に存在するエネルギーを電力に変換します。充電や電池の取り換え、燃料補給が必要なく、電源配線も不要です。
太陽光発電
照明とセンサーを連動させることにより、無駄な点灯を防ぐため、点灯に必要な消費電力を削減でき、ソーラーパネルや蓄電池の小型化を実現します。
圧電発電
押す力で発電したエネルギーを、ドアの開閉信号制御や各種電源やON/OFFなどに利用することで、信号線や電源線を不要にし、完全なるワイヤレス(ケーブルレス)にすることが可能となります。
