![]()
Japan
ViiK Alarm D OVS-01TCP(J)について
ViiK Alarm D OVS-01TCP(J) 検知原理・基本動作
- 本機はマイクロ波の反射を利用して車両を検知するセンサーです。
(反射量が大きいほど検知しやすい傾向にあります。) - マイクロ波センサーはFMCW方式を採用しているため在車検知が可能です。
- 検知ロジックは次のようになります。
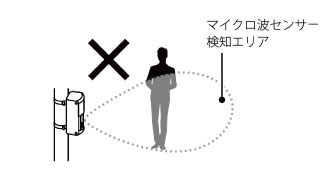
(複数の人や荷物を持って進入した場合、検知することがあります)
センサーの検知原理上、以下のような場合があります。
- 車両が検知エリアから離脱した場合でも、検知エリア内に人などの物体がある場合は非検知状態になりません。
旗やのぼり、伸びた草などでも非検知にならない(なりにくい)ことがあります。 - 複数の車両が連続して検知エリアに進入した場合、1台とみなします。
ViiK Alarm D OVS-01TCP(J) 設置条件
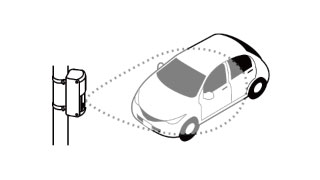
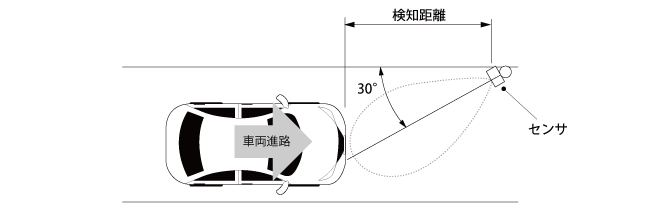
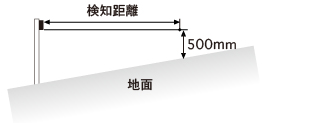
センサーを設置する際は図のようなレイアウトになるようポールを設置してください。
センサーの設置方向や設置高さが適正でない場合、正しく動作しません。
設置高さ:本センサー下端が地面から500mm
設置角度:車両の進路に対して30°向ける
設置距離:操作部の検知距離変更ボタンで設定
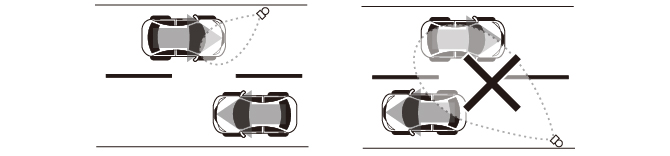
対面通行路でご使用のときは、センサーは検知したい車両進路側に設置してください。対向車線をはさんでの検知はできません。
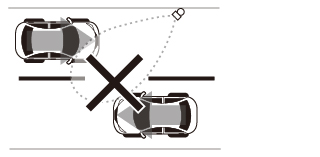
対面通行路でご使用のときは、検知エリアが対向車線にはみ出さないように検知距離を調整してください(施工説明書12ページ「4-2.設定確認と変更」参照)。
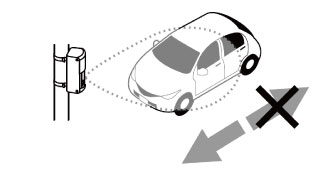
検知エリアの先端付近では逆走車両を検知することがあります。
センサーを傾いたポールに設置すると地面を検知してしまい、正しく動作できません。
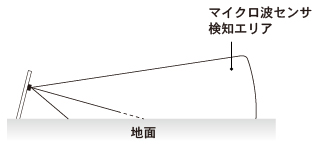
坂などで地面に対して垂直に立てられない場合は、設定した検知距離での高さが地面から500mmになる位置に設置してください。但し、地面と垂直に設置したときと比べて検知性能が劣る可能性があります。
センサーの検知エリア内に旗やのぼりなどの動くものを置かないでください。
また、検知エリア内に草木がある場合は撤去するか検知エリアを短く設定してください。
センサーが非検知状態にならないことや、非検知状態になるまで、時間がかかることがあります。
検知エリアの周辺に蛍光灯機器を設置しないでください。正しく動作できないことがあります。
ViiK Alarm D OVS-01TCP(J) 検知条件
時速2~30kmで進入する車両を検知します。
センサーの特性上、以下のような場合があります。
- 設置条件に適合しない場所に設置された場合、正しく動作しません。
- 正しく設置・設定されていない場合、正しく動作しません。
- 複数の人や自転車、大きな荷物(特に金属)などが検知エリアに進入した場合、検知することがあります。
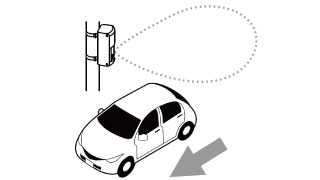
- 車両の大きさによっては検知できないことや、検知が途切れることがあります。
- 車両が進入(停止)する位置や方向によっては検知できる距離が短くなることや、検知できないことがあります。
また、逆走する車両でも低速で進入した場合は検知することがあります。 - 次のときセンサーが正常に動作しないことがあります。
・地面とセンサーを設置するポールが垂直でないとき
・センサー表面に氷や雪、ガムや泥などが付着したとき
・センサーのエリア内に一定以上の積雪があるとき
電話でのお問い合わせ
- フリーコール
- 0800-888-8700
- FAX
- 03-5473-3990